
重新定义
立体化智能巡检
Redefining 3D Intelligent Inspection
基于激光SLAM自主定位导航,无需GNSS信号。无人机与地面机器人深度协同, 覆盖地铁站、变电站、水电站、隧道等多场景,巡检效率提升70%以上。
Laser SLAM autonomous navigation without GNSS. Deep synergy between UAVs and ground robots, covering metro stations, substations, hydropower plants, tunnels and more. Inspection efficiency improved by over 70%.

为什么需要空地协同?
Why Is Air-Ground Collaboration Necessary?
传统巡检方案存在根本性局限,空地协同是唯一的立体化解决路径
Traditional inspection methods have fundamental limitations. Air-ground synergy is the only path to true 3D coverage.
人工巡检效率低,高处设施无法到达
Manual inspection is inefficient; elevated facilities are unreachable
无人机覆盖高处,地面机器人覆盖地面,立体化全覆盖
UAVs cover elevated areas, ground robots cover the floor — full 3D coverage
地面机器人无法跨越障碍(跃层、阶梯、闸机)
Ground robots cannot cross obstacles (stairs, gates, multi-level floors)
无人机可飞越任何地面障碍,与地面机器人协同互补
UAVs fly over any ground obstacle, complementing ground robots seamlessly
室内无人机产品缺失(大疆等无法室内使用)
No indoor UAV products available (DJI etc. cannot operate indoors)
基于激光SLAM定位,无需GPS,专为室内密闭环境设计
Laser SLAM positioning, GPS-free, designed for indoor enclosed environments
传统无人机续航短,无法大范围巡检
Traditional UAVs have short battery life, unable to cover large areas
车载机巢自主充电+系留版续航1小时,持续巡检无忧
Vehicle-mounted nest for auto-charging + tethered version with 1h endurance
六大核心技术优势
Six Core Technical Advantages
国际首创空地协同立体化巡检技术,多项核心技术指标行业领先
World's first air-ground synergy 3D inspection technology with industry-leading specifications
激光SLAM自主定位
Laser SLAM Autonomous Navigation
无需GNSS信号,在密闭环境中实现±3-5cm高精度定位导航
No GNSS required. ±3-5cm precision in enclosed environments
空地协同立体巡检
Air-Ground Synergy Inspection
国际首创无人机+地面机器人深度协同,消除监控死角
World's first deep UAV + ground robot collaboration, eliminating blind spots
车载机巢自主起降
Vehicle-Mounted Nest Auto Launch
无人机在地面机器人上自主起飞、降落、充电,全程无人干预
UAV auto take-off, landing & charging on ground robot — fully autonomous
自组网实时通信
Ad-hoc Real-time Communication
空地机器人间实时协同通讯,通信延迟低于100ms
Real-time air-ground communication with <100ms latency
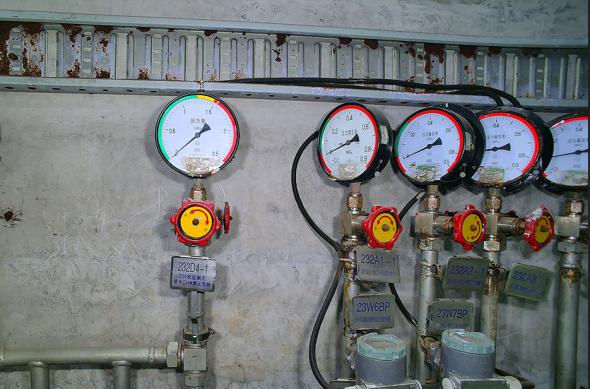
AI智能检测
AI-Powered Detection
Nvidia Orin NX + YOLO算法,实时识别异常、读取仪表、生成报告
Nvidia Orin NX + YOLO for real-time anomaly detection & meter reading
全开源ROS2平台
Fully Open-Source ROS2 Platform
全部算法模块基于Ubuntu 22.04 ROS2开发并开源,支持快速二次开发
All modules built on Ubuntu 22.04 ROS2, open-source for rapid customization
全系产品矩阵
Complete Product Portfolio
从科研入门到行业部署,7款产品覆盖轮式、四足、系留、复合作业等全场景需求
From research entry to industrial deployment — 7 models covering wheeled, quadruped, tethered, and composite operation scenarios
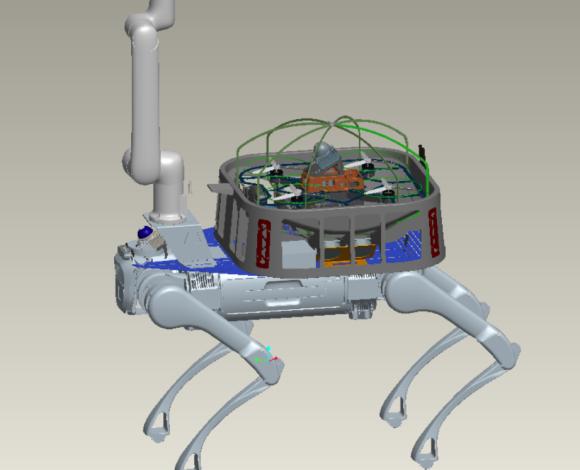
翔阳2号Plus · 四足版
XiangYang-2 Plus Quadruped
四足复合作业机器人 / Quadruped Composite Operation Robot
旗舰级产品,将四足机械狗与六自由度机械臂、无人机三者融合,具备全地形通过能力和自主操作能力,是最完整的空地协同复合作业解决方案。
Flagship product integrating quadruped robot dog, 6-DOF robotic arm, and UAV. Full terrain capability with autonomous operation — the most complete air-ground composite solution.

翔云2号 · 基础版
XiangYun-2 Basic
空地协同巡检系统 / Air-Ground Synergy Inspection System

翔云2号 · 专业版
XiangYun-2 Pro
空地协同巡检系统 / Air-Ground Synergy Inspection System

翔阳2号 · 四足版
XiangYang-2 Quadruped
四足空地协同系统 / Quadruped Air-Ground Synergy System

翔阳2号Plus
XiangYang-2 Plus
复合作业机器人 / Composite Operation Robot

翔阳3号 · 系留版
XiangYang-3 Tethered
系留无人机协同系统 / Tethered UAV Synergy System

行业版
Industrial Edition
工业级巡检系统 / Industrial-Grade Inspection System
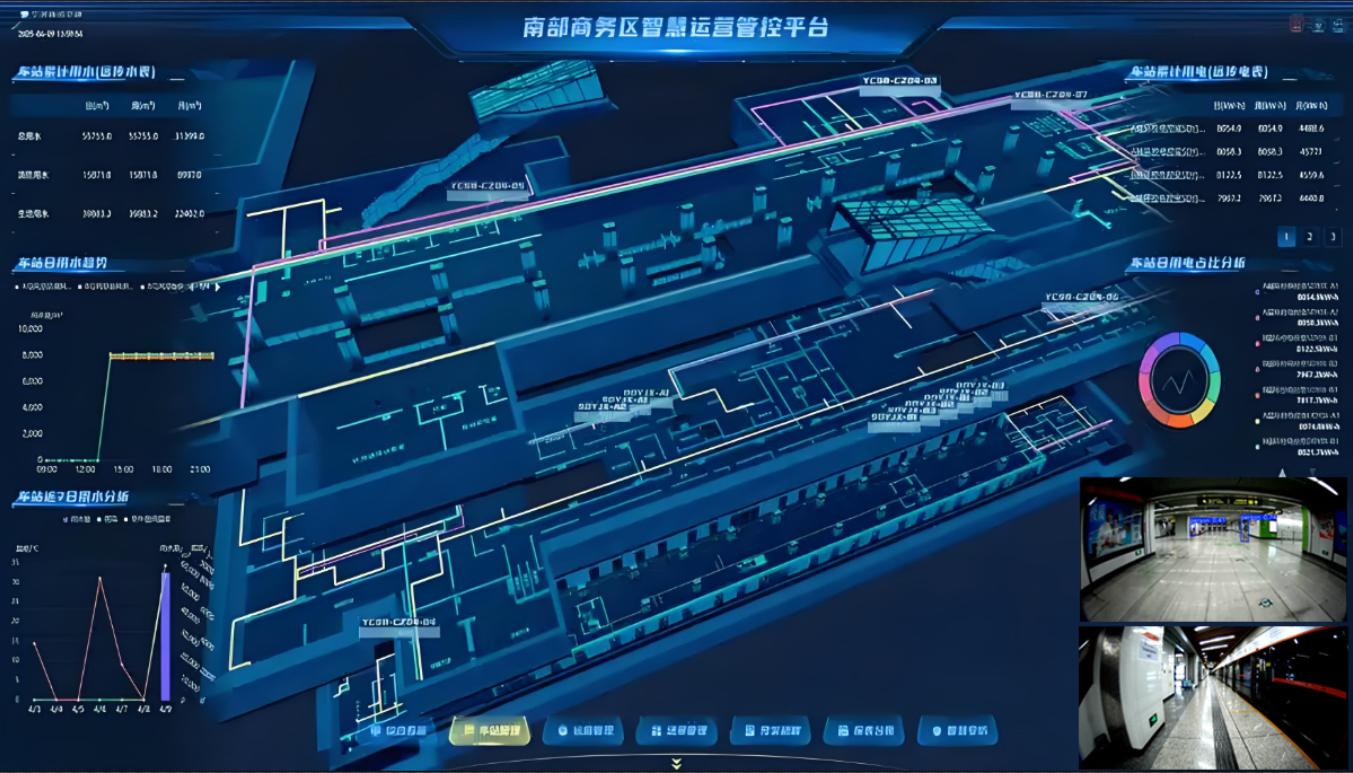
多场景深度应用
Deep Application Across Multiple Scenarios
从央企水电站到城市地铁,从化工厂到科研院所,空地协同巡检系统已在多个行业场景中验证落地
From state-owned hydropower stations to urban metro systems, from chemical plants to research institutions — proven across multiple industries



合作客户与伙伴
Clients & Strategic Partners
服务央企、国企、上市公司及多所知名高校,技术实力获行业认可
Serving state-owned enterprises, listed companies, and leading universities — industry-recognized expertise
行业客户
Enterprise Clients
高校合作
University Partners


技术架构与发展历程
Technology Architecture & Development History
核心团队来自大连理工大学智能机器人实验室,深耕SLAM定位导航技术十余年
Core team from Dalian University of Technology Intelligent Robotics Lab, with 10+ years of expertise in SLAM localization & navigation
定位导航
Positioning & Navigation
计算平台
Computing Platform
AI视觉
AI Vision
通信协同
Communication & Synergy
开源生态
Open-Source Ecosystem
协同算法
Collaborative Algorithms
全栈软件系统
Full-Stack Software System
全部算法模块基于ROS2开发并开源,支持快速二次开发与定制
All algorithm modules developed on ROS2 and open-sourced, supporting rapid customization
发展历程
Development Milestones
发布3D BOX:室内外三维SLAM建图、定位、导航设备
Released 3D BOX: Indoor/outdoor 3D SLAM mapping, localization & navigation device
发布第一代基于激光/视觉SLAM技术的室内外自主导航移动机器人平台
Released 1st-gen indoor/outdoor autonomous navigation mobile robot platform based on Laser/Visual SLAM
发布3D BOX R100:旋转式三维激光SLAM定位建图设备
Released 3D BOX R100: Rotating 3D Laser SLAM localization & mapping device
发布可自主导航的全向全驱动移动机器人平台
Released omnidirectional all-wheel-drive autonomous mobile robot platform
发布轻量化SLAM扫描系统3D BOX Rlite及3D BOX Lite
Released lightweight SLAM scanning systems: 3D BOX Rlite & 3D BOX Lite
发布第一代基于激光定位系统自主无人机平台与第一代复合机器人
Released 1st-gen autonomous UAV platform with laser localization & 1st-gen composite robot
发布青云1号室内自主无人机巡检系统与翔云2号空地协同巡检系统
Released QingYun-1 indoor autonomous UAV & XiangYun-2 air-ground collaborative inspection system
翔阳3号系留版、行业版发布,全系7款产品矩阵成型,完成三峡集团部署
Released XiangYang-3 tethered & industry editions; 7-product matrix formed; deployed at Three Gorges Corp.
获取专属巡检方案
Get Your Custom Inspection Solution
无论您是科研机构寻求实验平台,还是企业客户需要行业巡检解决方案,我们的技术团队将为您提供专业咨询。
Whether you're a research institution seeking an experimental platform or an enterprise needing industrial inspection solutions, our technical team will provide professional consultation.